HP1000
Матрица вентилей разработана в сотрудничестве с компаниями VÚMS и Tesla Rožnov (в этой главе не обсуждается одноименный компьютер от Hewlett-Packard). Функция поля определялась последними металлическими слоями, которые соединяли отдельные элементы «нижних» литографических структур, и это создавало результирующую схему, обозначенную ЗИО или ПЗИО (полузаказная интегральная схема). Судя по дате на схеме, она была произведена примерно в 1989 году.
Базовый чип имел размеры 7,55 х 7,25 мм, его первая версия была смонтирована в керамическом корпусе PGA 120. Диапазон рабочих температур составлял 0–70°С. Интегральная схема требовала двух внешних источников питания (+5,0 В и +2 В). 4 В), а также два заземления, которые были подключены для повышения помехоустойчивости вплоть до печатной платы. Контакты обеих стран выведены через 8 контактов корпуса PGA 120, питание +5В выведено через 4 контакта, питание +2,4В через 8 контактов.
Входные и выходные преобразователи были распределены по периметру микросхемы, уровни соответствовали уровням серии 74АЛС. На микросхеме было 92 входных преобразователя, а используемых выходных преобразователей была создана матрица из 32 столбцов и 34 строк. внутри чипа, т.е. всего 1088 ячеек, из которых можно было создавать разные типы ворот. На микросхеме также созданы четыре усилителя тактовых импульсов для распределения сигналов с высокой разветвленностью.
Соединение вентилей и преобразователей в логическую сеть реализовано в два слоя металлизации. При этом по заказу заказчика были спроектированы три маски: одна маска для соединения преимущественно в направлении X, вторая маска для соединения преимущественно в направлении Y и третья маска для межслойного соединения. Были доступны основные функциональные элементы, такие как вентили И-НЕ, И, И-ИЛИ, входные преобразователи, выходные преобразователи и усилители тактовых импульсов.
Основными разработчиками HP1000 являются Эдуард Коттек, Владимир Штястный, Ян Кршивоглавек, Франтишек Кудрна и Мирослав Печучек.
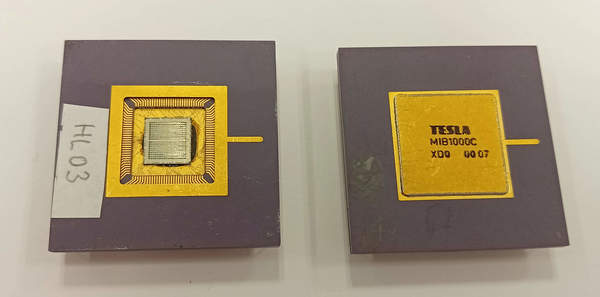
МИБ1000C
Полузаказные интегральные схемы MIB1000C были разработаны на базе HP1000.
В схеме реализовано цифровое управление в замкнутом контуре серводвигателя управления приводом движения бумаги по одной координатной оси или для перемещения каретки с рисовальным пером по второй оси координат цилиндрического чертежного устройства формата от А0 до А4 типа VZ 565 – CM 6426 или цилиндрического чертежного устройства формата А3 типа VZ 300. При управлении каждым цилиндрическим чертежным устройством, Схема использовалась дважды – отдельно для каждого и всегда вместе с управляющим микропроцессором типа 8086.
MIB1000C/0202
Схема реализовала функции, аналогичные тем, которые построены на меньшей вентильной матрице HP200 (HP221 и HP222) вместе в одном корпусе, но для микропроцессора типа 80286.
Ссылки
- https://stm-ke.sk/asset/uploads/vystavy/Historia_vyroby_elektronickych_s.pdf (WebArchive) (archive.is)
- http://www.ebastlirna.cz/modules.php?name=Forums&file=viewtopic&t=36066 (WebArchive) (archive.is)
- Aktuality výpočetní techniky č. 66 (1988)
- Aktuality výpočetní techniky č. 76 (1991)
- Ing. Miroslav Pěchouček, CSc. Aktuality výpočetní techniky č. 74/16 Diagnosticky vybavené obvody pro HP1000
- Ing. Jan Rada Aktuality výpočetní techniky č. 74/23 Algoritmy generátoru testů hradlových polí HP1000
- Ing. Daniel Nevečeřal, Ing. Vanda Růžičková, Ing. Jaroslav Tůma, Aktuality výpočetní techniky č. 74/28 Prostředky pro testování desek s hradlovými poli
- Marie Vlčková, Zdeněk Korvas. Návrh počítače s hradlovými poli HP1000. Konference ve Vrátné dolině, Žilina, 1988
- Sdělovací technika: měsíčník pro rozvoj a praxi sdělovací elektrotechniky. Praha: Státní nakladatelství technické literatury, 11.1990, 38(11), s. 437. ISSN 0036-9942. Dostupné také z: https://ndk.cz/uuid/uuid:b07c5780-b889-11e9-b601-005056825209